Un système d’inertial est un système de coordonnées dans lequel les organismes se déplacent uniformément en ligne droite et aucune force ne l’agit. Ce comportement est basé sur la loi de l’inertie de Galileo. L’inertie est quand un corps reste en mouvement pendant que aucune force ne l’agit. Cette inertie est proportionnelle à la masse du corps, qui peut également être considérée comme une masse ponctuelle.
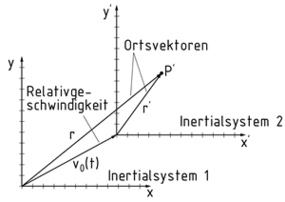
Point P peut être défini à l’aide des vecteurs de position des systèmes d’inertie concernés. Dans le diagramme, $ \ vec {{{{r} ‘} $ est la position du point P. est déterminée à l’aide de la transformation galilée par rapport à un autre système d’inertiel, tel que: $ {\ vec {r}}’ = \ \ \ VEC {R} – {{\ VEC {V}} ^ {0}} T $. où $ {\ vec {v}}} est la vitesse et l’heure relatives.
Il est extrêmement important de prendre en compte les systèmes d’inertie dans les mouvements. Pour une évaluation ambiguë, celles-ci devraient être considérées par rapport à un système de référence.
Exemple: une personne déplace dans un train voyageant à basse vitesse. Cette personne bouge exactement à la même vitesse que le train mais dans la direction opposée. Basé sur le système inertial de la gare, la personne est stationnaire. Basé sur le système d’inertial du train, toutefois, la personne bouge.
transformation de deux systèmes inertiels